Les aligneurs créent-ils l’ancrage ?
Auteurs : Guillaume lecocq

L’ancrage « naturel » de l’aligneur
Le mouvement dentaire met en jeu trois éléments : un système de force, une résistance mobile constituée de la ou des dent(s) à déplacer et une résistance stabile constituée de la ou des dent(s) servant d’ancrage.
Le besoin d’ancrage dépend des mouvements dentaires à réaliser, donc de la direction et de l’intensité des forces à mettre en jeu. Puis la 3e loi de Newton (action = réaction) s’applique ; même avec les aligneurs.
Chaque aligneur est un dispositif flexible dont les dimensions sont fixes et invariables : chaque logement accueillant la dent a une dimension qui ne varie pas, et ses dimensions transversale, sagittale et verticale sont fixes également. Un aligneur impose donc un périmètre et une longueur d’arcade définie, fixe et invariable pendant la durée de son port, créant de fait un renforcement de l’ancrage.
Au contraire, l’arc d’un appareil multi-attache permet une modification de la forme d’arcade sans contrôle précis de la vestibulo-version : la forme d’arcade et la longueur d’arcade sont modifiées sans planification. Si l’on veut bloquer la longueur et le périmètre d’arcade pour renforcer l’ancrage, il faudra ajouter sur l’arc des stops ou des omégas en butée des molaires…
Les aligneurs ont donc cette caractéristique d’offrir un ancrage spécifique qui s’illustre particulièrement bien lors de traitements nécessitant des phases de stripping latéral pour gagner de l’espace et permettre l’alignement incisivo-canin.
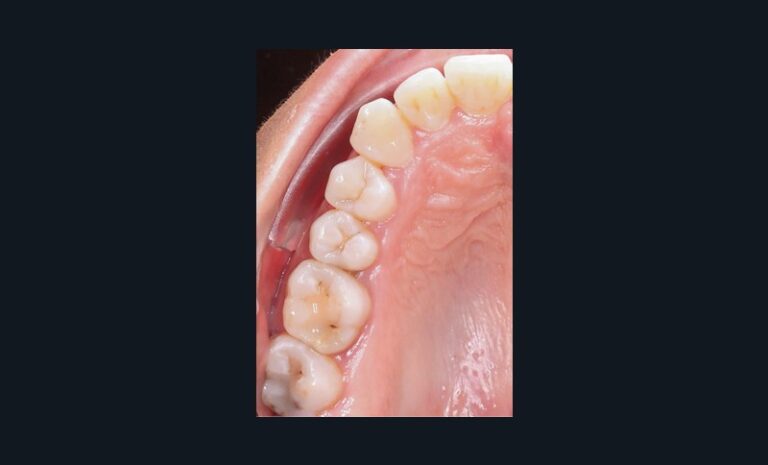
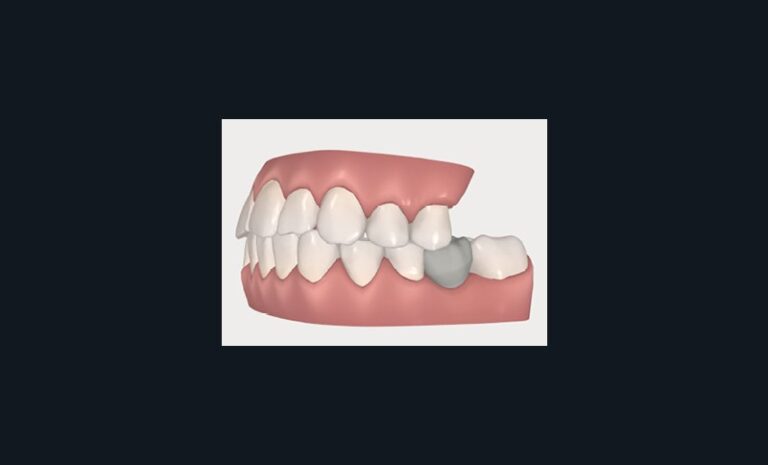
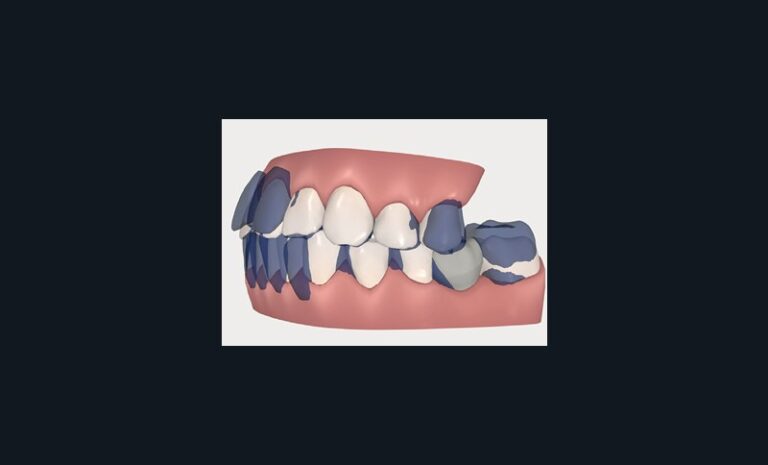
Dans l’exemple (fig. 1 et 2), la patiente présente une classe 1 molaire et classe 2 canine bilatérale sur un schéma normodivergent de classe 2 squelettique associé à une biproversion incisive et la canine 23 incluse.


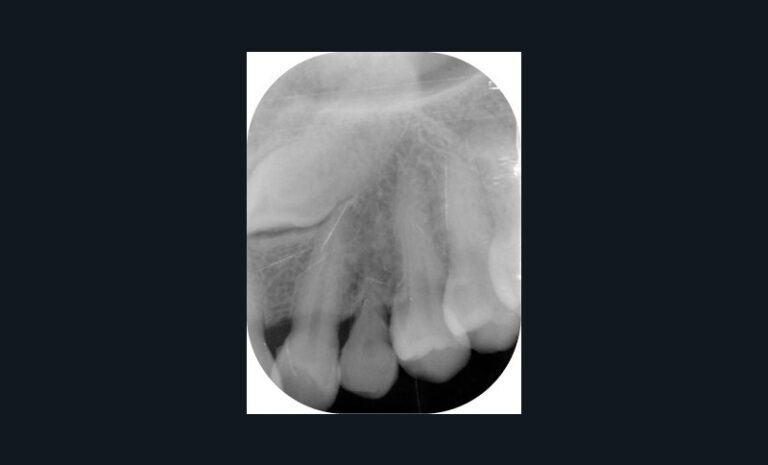

Avec les aligneurs que je programme, la première phase de traitement consiste en un stripping de 0,5 mm de mésial molaire à distal canine afin de permettre une distalisation des prémolaires et canines pour obtenir un gain possible de 1,5 mm en mésial des canines avant l’étape d’alignement incisif.
En multi-attache, il aurait fallu d’abord procéder au nivellement-alignement, donc mettre en mouvement et mettre en route la réaction histologique du déplacement de toutes les dents, pour arriver finalement sur un arc suffisamment rigide pouvant supporter la distalisation et des butées en mésial des molaires (oméga, stops à sertir…) afin de renforcer l’ancrage en maintenant la longueur et le périmètre d’arcade. Ensuite, il aurait fallu procéder au recul individuel de la deuxième prémolaire de 0,5 mm, puis de la première prémolaire de 1 mm et enfin de la canine de 1,5 mm. L’ensemble de ces mouvements nécessite de nombreuses activations cliniques des chaînettes, sollicite toujours le même ancrage molaire pour placer la chaînette et risque de voir le retour à la position mésiale de la dent précédemment distalée si elle n’est pas bloquée.
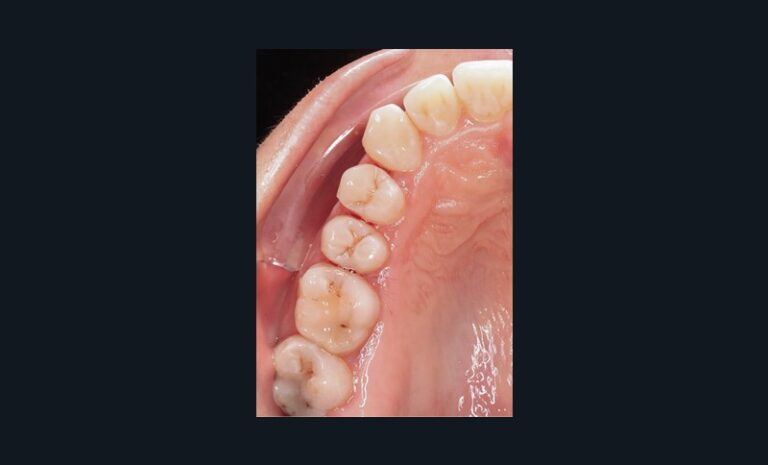
Ces obstacles sont automatiquement supprimés grâce à cet ancrage naturel lié à la conception et à la programmation des aligneurs (fig. 3) :
- sur les quatorze dents de l’arcade, seules les prémolaires et canines sont mises en mouvement ;
- toutes les autres dents ne sont pas déplacées et n’ont pas été déplacées préalablement, donc la réaction histologique du déplacement dentaire n’est pas amorcée sur ces huit dents d’ancrage ;
- chaque prémolaire et canine est encapsulée dans son logement sur l’aligneur et prévient tout risque de récidive mésiale ;
- l’ensemble des prémolaires et canines est sollicité en un seul temps, avec une seule série d’aligneurs, ce qui permet de réduire la durée clinique de la phase de distalisation des secteurs latéraux.
Dans cette configuration, les aligneurs constituent un avantage et une supériorité indéniable sur les multi-attaches : ils créent un ancrage « naturel » lié au maintien de la longueur et du périmètre d’arcade.
En outre, les simulations virtuelles des mouvements permettent de réaliser les aligneurs en sélectionnant les dents à mettre en mouvement. Pour autant, la 3e loi de Newton s’applique : l’action de déplacer les prémolaires et les canines génère une réaction sur les autres dents qui servent d’ancrage et reçoivent donc une force susceptible de les déplacer. Dans le cas présent, l’ancrage dentaire naturel associé au maintien du périmètre et de la longueur d’arcade par l’aligneur permet d’éviter les mouvements parasites.
Cependant, la simulation n’est qu’une animation vidéo et n’a qu’un lien éloigné avec la réalité clinique. Pourtant, le praticien se base sur la projection des mouvements pour établir son traitement, ancrant ainsi son choix sur une approximation.
Le biais d’ancrage des aligneurs
Ici, le biais d’ancrage est une notion de psychologie sans lien avec la biomécanique. Il est la tendance à utiliser indûment une information comme référence. Il s’agit généralement du premier élément d’information acquis sur le sujet.
Ce biais d’ancrage est systématique avec les aligneurs car le praticien reçoit une simulation des mouvements dentaires, proposition de traitement qu’il découvre et à partir de laquelle il base, ancre son analyse. Cette modalité de réflexion est à l’inverse de la construction intellectuelle normale du raisonnement médical et scientifique.
Lors d’un traitement multi-attache, le praticien a des objectifs qu’il atteint par étapes : nivellement, alignement, établissement de la forme d’arcade, établissement du torque, recul en masse… Les rendez-vous cliniques servent à valider la réalisation de chacune de ces étapes pour adapter le traitement et passer à l’étape suivante selon le raisonnement thérapeutique du praticien.
Dans le cas des aligneurs, une proposition de traitement est simulée, puis analysée par le praticien qui effectue un raisonnement a posteriori basé sur ces hypothèses animées. Le rôle du praticien se borne à contrôler que les mouvements simulés sont vraisemblables, mais son raisonnement n’est pas objectif car il est influencé par la proposition qui constitue un biais d’ancrage redoutable limitant la réflexion intellectuelle.
Le praticien se soumet volontairement à une modalité de pensée qui le limite, le rend crédule et dépendant d’un dessin animé 3D qui crée une illusion du mouvement permettant de faire naître des croyances quant aux possibilités techniques de l’outil aligneur.
Mais si le mouvement virtuel est sans limite, l’aligneur est soumis aux limites bien réelles de la physique et biologique, et donc de la BIO-MÉCANIQUE.
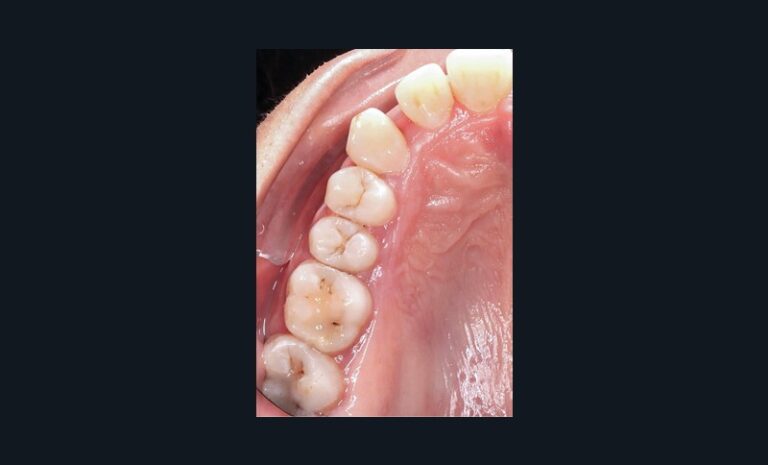
L’illusion du mouvement est illustrée dans l’exemple clinique (fig. 4) qui montre une ingression molaire pure sans effet sur les dents d’ancrage.

Cet exemple est caricatural et son absurdité semble évidente, mais une torsion de la réalité clinique existe plus ou moins à chaque étape de la simulation, pour chaque aligneur. Et les imprécisions s’accumulent avec le nombre d’aligneurs contribuant ainsi à la difficulté de voir la prédiction virtuelle devenir réalité : en moyenne, les mouvements s’expriment à 50 % de leur planification [1-3].
L’illusion liée à la virtualisation des mouvements a laissé penser que les aligneurs permettaient un meilleur ancrage que les systèmes traditionnels. Autrement dit, les simulations 3D influencent, tordent tellement la réflexion du praticien qu’il en vient à créer une nouvelle référence biomécanique en dehors de toute réalité physique et clinique.
Les limites de l’ancrage « naturel » des aligneurs
Si les dimensions de l’aligneur sont fixes et peuvent constituer un avantage dans le maintien de la longueur et du périmètre d’arcade, cela constitue une contrainte forte qui, comparativement aux multiattaches, limite les possibilités d’expansion et oblige à la réalisation de nombreux aligneurs pour atteindre une expansion similaire ; augmentant d’autant la durée de traitement.
La solution trouvée afin de limiter le nombre d’aligneurs et réduire la durée prévisionnelle de traitement est d’adapter la taille des dents à l’aligneur en réalisant du stripping. Le stripping est donc la conséquence des limites techniques de l’outil et non la traduction d’un besoin thérapeutique issu d’une réflexion clinique. Aussi, cela explique-t-il qu’il y ait beaucoup plus de stripping en aligneur qu’en multi-attache.
❝ Le stripping est la conséquence des limites techniques de l’outil et non la traduction d’un besoin thérapeutique issu d’une réflexion clinique. ❞
En effet, le nivellement-alignement nécessite de la place pour loger le diamètre mésio-distal des dents et compenser l’allongement de la longueur d’arcade lié au nivellement. Si la longueur d’arcade doit changer, alors l’aligneur ne joue plus ce rôle d’amélioration de l’ancrage et devient une contrainte obligeant à la réalisation de stripping se justifiant surtout pour des raisons techniques.
L’ancrage clinique n’est pas l’ancrage virtuel proposé sur la simulation 3D. Or la réflexion a posteriori basée sur l’analyse de la simulation amène à considérer les dents animées comme les seules à se déplacer, les autres constituant un ancrage absolu car immobiles sur l’animation. Cette idée est ancrée avec les tableaux de mouvements fournis pour montrer quelles dents bougent et quelles dents restent immobiles.
Il existe plusieurs fausses idées issues de ce jeu vidéo des déplacements dentaires et qui font fi de la 3e loi de Newton.
Une première erreur majeure de la conception virtuelle est la correction de la supraclusion simulée par ingression incisive seule. Dans la dimension verticale, toute action d’ingression incisive provoquera une réaction d’égression canine et prémolaire [4]. D’un point de vue clinique, l’ingression incisive stricte ne peut avoir lieu sans auxiliaires telles que des vis d’ancrage.
En outre, l’ingression incisive ne permet pas de régler l’angle inter-incisif pourtant garant de la stabilité de la correction de la supraclusion. Pour établir un torque incisif correct, il faut un mouvement des apex dont la prédictibilité est de 10 % avec les aligneurs [5].
La deuxième erreur de la conception virtuelle est le recul pur des molaires maxillaires comme solution à la correction de la classe 2. Dans la dimension sagittale, tout mouvement de recul molaire provoquera une mésialisation des dents antérieures. Ce phénomène est bien documenté avec le pendulum et également avec les aligneurs [6-8]. Les deux appareils comptent sur l’ancrage antérieur pour « reculer » les molaires. Or les études montrent une perte d’ancrage antérieure comprise entre 25 % et 40 % de l’espace gagné lors de la première phase de recul molaire. Ensuite, lors de la deuxième phase de recul des prémolaires, puis des canines, 90 % de l’espace gagné initialement est perdu (études réalisées avec le pendulum).
Une autre idée fausse est de croire que les taquets sur les dents, notamment postérieures, sont des renforts d’ancrage. Les taquets ne sont pas un auxiliaire d’ancrage ou même un renfort modifiant la valeur d’ancrage de l’unité dentaire. Les taquets sont présents uniquement pour garder l’aligneur coapté sur les dents comme la ligature maintient le fil dans le slot. Le taquet n’est qu’un relief en composite sur la dent et sa forme n’a que peu d’importance car il a pour seul but de maintenir en place l’aligneur sur la dent qui, elle, servira d’ancrage. La décoaptation entre l’aligneur et la dent servant d’ancrage doit être évitée à tout prix car elle sera à l’origine d’une perte d’ancrage.
❝ Une idée fausse est de croire que les taquets sont des renforts d’ancrage. ❞
Le corolaire est que l’utilisation d’un auxiliaire nécessitant une découpe de l’aligneur pour pouvoir être mis en place (ex : élastiques intermaxillaires) contribue à réduire la surface de contact disponible entre l’aligneur et la dent et donc le maintien de l’aligneur en place : cela contribue à augmenter le risque de décoaptation entre l’aligneur et la dent d’ancrage.
Conclusion
Il faut distinguer :
- l’ancrage orthodontique qui résulte de l’analyse des mouvements dentaires à réaliser et est indépendant de l’appareil utilisé ;
- la rétention de l’aligneur sur les dents qui peut être renforcée par l’utilisation de taquets : certains peuvent considérer que c’est l’ancrage de l’aligneur sur la dent, mais en aucun cas il ne fait varier l’ancrage orthodontique nécessaire à la réalisation des mouvements dentaires ;
- l’ancrage psychologique constitué par les simulations des mouvements dentaires qui créent un biais majeur dans l’analyse thérapeutique en tordant la réflexion médicale d’un praticien consentant dont les compétences intellectuelles s’étiolent alors inévitablement dans une passivité coupable. C’est la fabrique à crétins.
Vous avez aimé cet article ?
Approfondissez la thématique en suivant la formation DPC du Dr Guillaume Lecocq :
Aligneurs : un orthodontiste parle aux orthodontistes
Bibliographie
- Upadhyay M, Arqub SA. Biomechanics of clear aligners: hidden truths & first principles. Journal of the World Federation of Orthodontists. J World Fed Orthod. 2022;11(1):12-21.
- Kravitz ND, Kusnoto A, BeGole E, et al. How well does Invisalign work? A prospective clinical study evaluating the efficacy of tooth movement with Invisalign. Am J Orthod Dentofacial Orthop. 2009;135:27-35.
- Haouili N, Kravitz ND, Vaid NR, et al. Has Invisalign improved? A prospective follow-up study on the efficacy of tooth movement with Invisalign. Am J Orthod Dentofacial Orthop. 2020;158:420-5.
- Liu Y, Hu W. Force changes associated with different intrusion strategies for deep-bite correction by clear aligners. Angle Orthod. 2018;88:771-778.
- Zhang XJ, et al. Integrated three-dimensional digital assessment of accuracy of anterior tooth movement using clear aligners. Korean J Orthod. 2015;45(6):275-281.
- Chiu P, McNamara J, Franchi L. A comparison of two intraoral molar distalization appliances: Distal jet versus pendulum. Am J Orthod Dentofacial Orthop. 2005;128:353-65.
- Bussick T, et al. Dentoalveolar and skeletal changes associated with the pendulum appliance. Am J Orthod Dentofacial Orthop. 2000;117:333-43.
- Saif BS, et al. Efficiency evaluation of maxillary molar distalization using Invisalign based on palatal rugae registration. Am J Orthod Dentofacial Orthop. 2022;161:e372-e379.
À propos des auteurs

- Attaché à l’université de Paris V d’enseignement pour le Diplôme Universitaire d’Orthodontie Linguale – Titulaire du Board Français d’Orthodontie
- Trésorier de la Association Française d’Orthodontie Numérique et Digitale
- Président de l’European Society of Lingual Orthodontic 2018
- Membre du Collège Européen d’Orthodontie
Formation E-learning DPC
-

Aligneurs
Biomécanique, conception et fabrication : comprendre les avantages et les limites pour remettre le praticien au cœur de la chaîne de soin- Programme intégré
- Action DPC 99F92425041
- 12 h en E-learning
- Éligible DPC (422 €)
Dernière mise à jour le 27 mars 2026